


项目背景:
基于3D视觉的机器人抓取系统具有可控性强、灵活性高以及配置柔性等优势,被广泛的应用于零件加工、协同搬运、物体分拣、部件装配等领域,可大幅节约工装和人力成本,作为面向未来的智能制造重点技术。
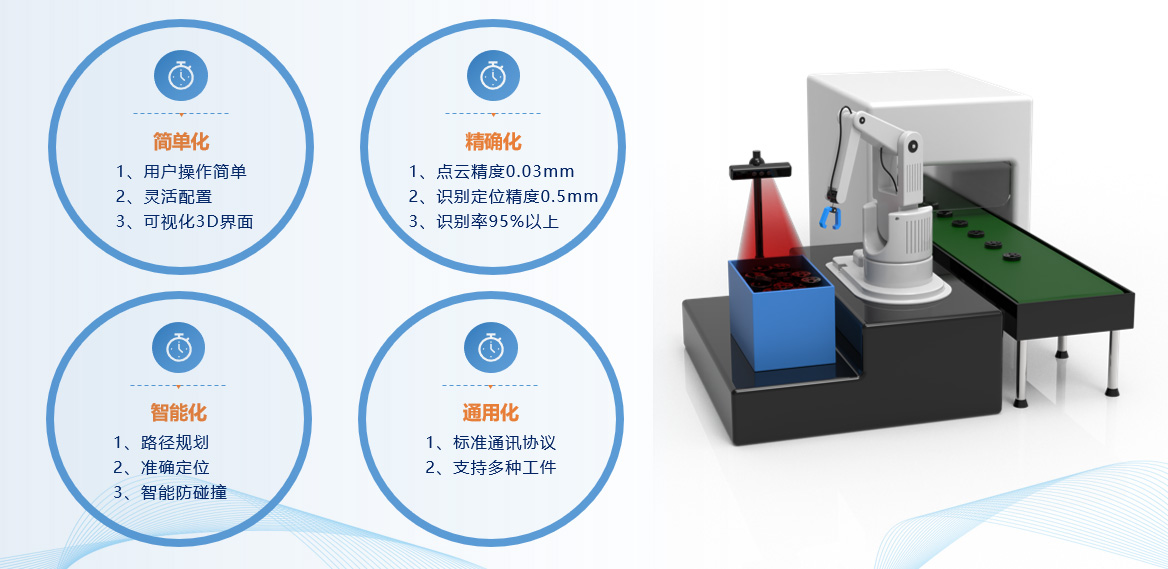
系统流程:
使用3D相机获取场景的点云数据,基于3D识别算法估计物体位置和姿态,将计算结果发送至机器人,并引导机械臂和抓手实现自适应抓取。
主要优势:
1. 可处理无颜色、纹理的物料;
2. 可处理形状对称的物料;
3. 可应对物料叠放、遮挡等情况;
4. 可应对多种物料混料堆放的情况;
基于3D视觉的机器人抓取系统具有可控性强、灵活性高以及配置柔性等优势,被广泛的应用于零件加工、协同搬运、物体分拣、部件装配等领域,可大幅节约工装和人力成本,作为面向未来的智能制造重点技术。
系统流程:
使用3D相机获取场景的点云数据,基于3D识别算法估计物体位置和姿态,将计算结果发送至机器人,并引导机械臂和抓手实现自适应抓取。
主要优势:
1. 可处理无颜色、纹理的物料;
2. 可处理形状对称的物料;
3. 可应对物料叠放、遮挡等情况;
4. 可应对多种物料混料堆放的情况;
评论
TA的案例
有5个案例












