当前位置:首页 / 案例库 / 机械臂驱动板
xiaowen0009
北京市 海淀区
有3个案例
智能调浆高效风光互补控制器
智能健康监测腕带
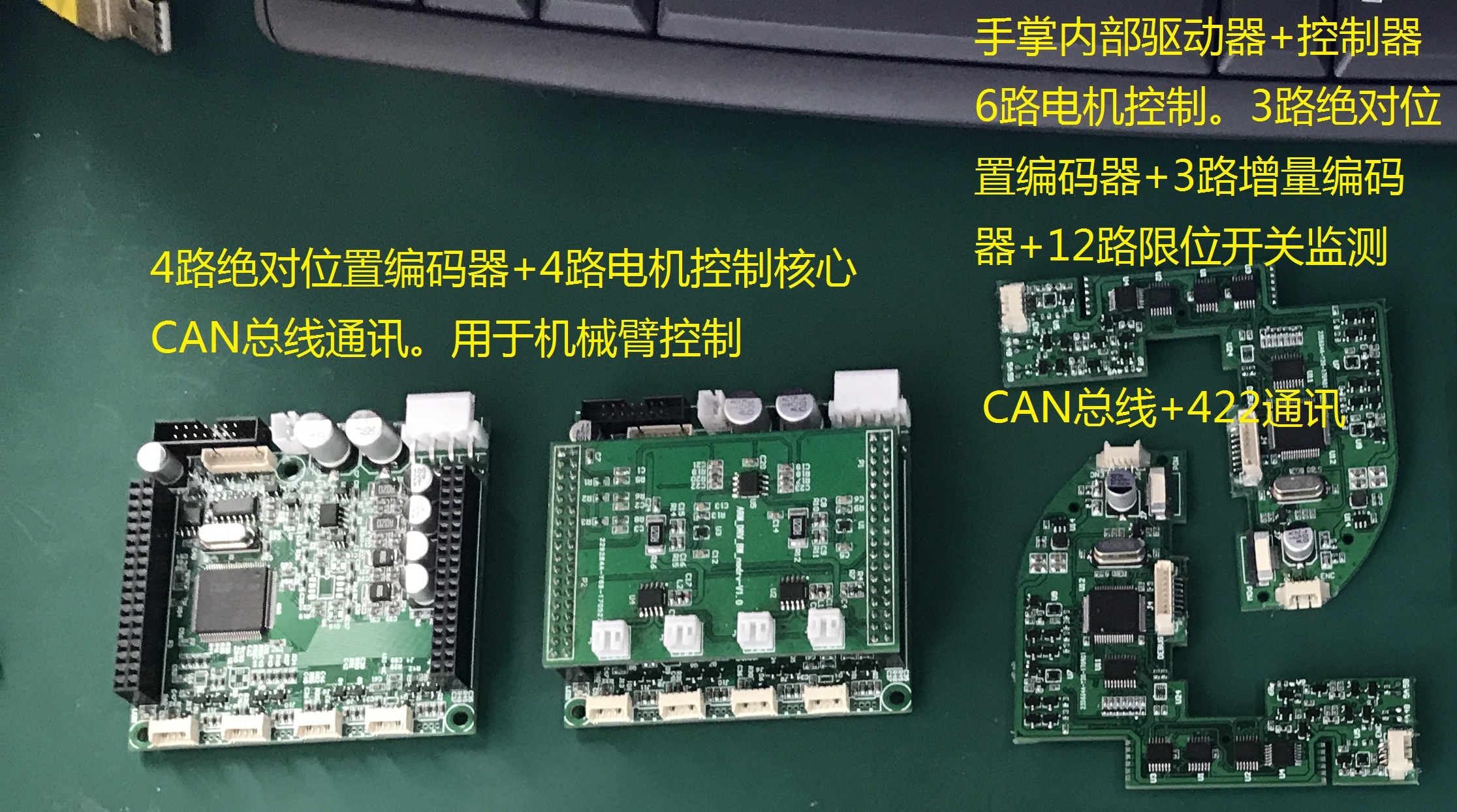
机械臂驱动板
利剑挥野
cjh-8894
gzq@cqq
两只松鼠
深圳闪电侠
客服QQ:1617942058