


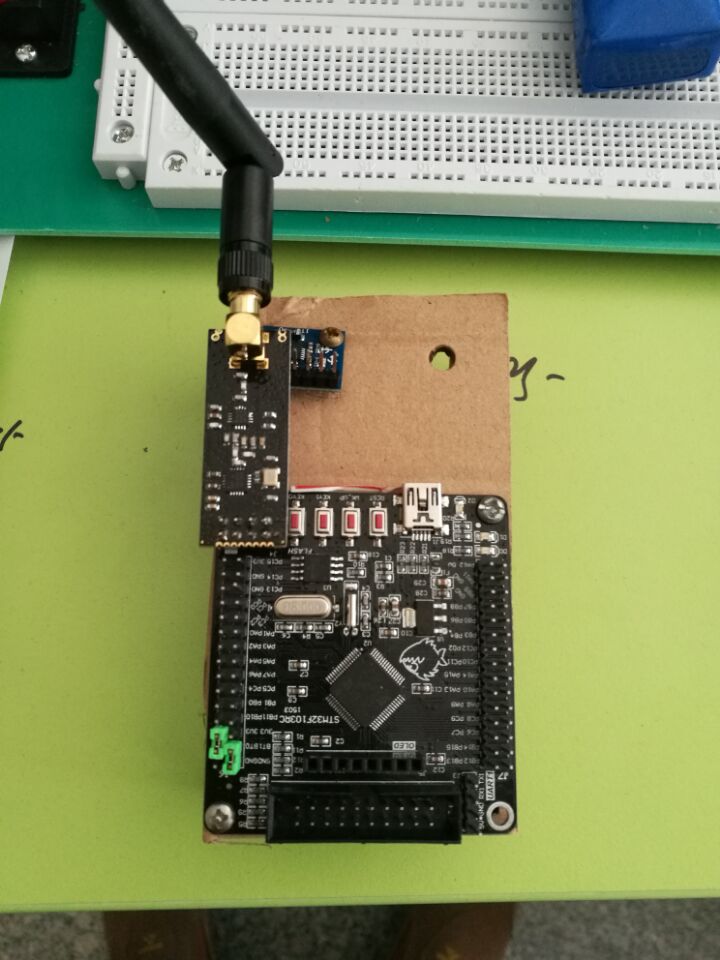
硬件系统基于STM32F103作为主控MCU,采用MPU6050作为姿态传感器;方案采用PID控制作为核心算法,通过对姿态倾角的快速刷新感知,通过PID算法更新PWM脉冲输出控制电机,实现平衡、前进后退以及转向动作。
配套APP可以对机体进行状态监控和指令控制。状态监控可以对速度、倾角等查询并实时显示;指令控制可以遥控无人机做出指定动作。
主要指标:
充电时间:1小时
爬坡能力:10-15
续航时间:0.5-1小时
载重:0.5KG
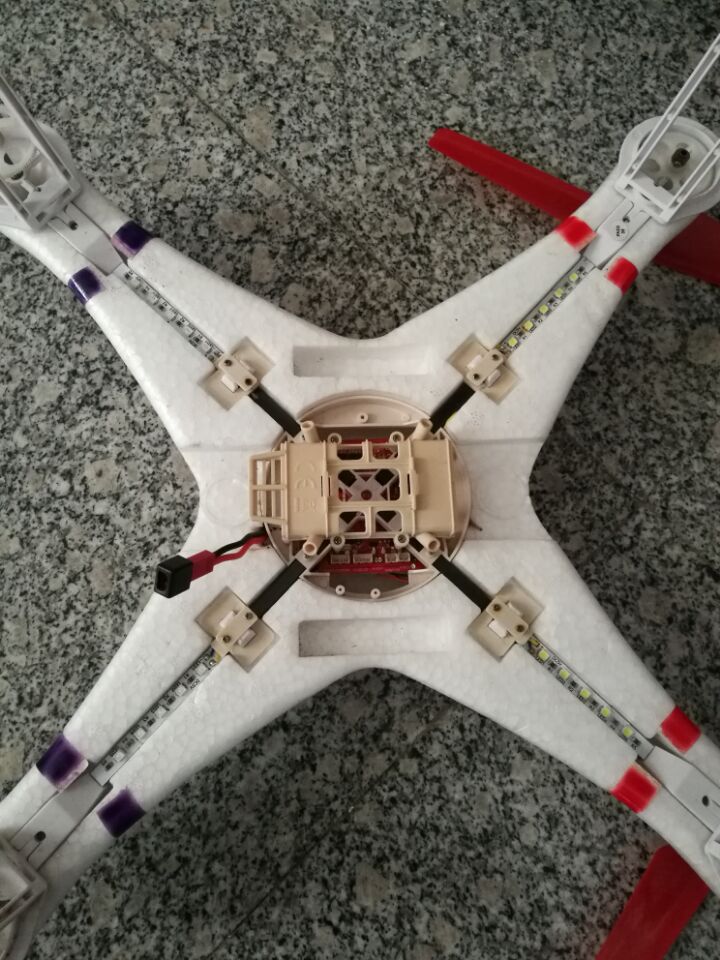
由于产品为原型机,外观设计还需要改进
接口设置有 : 充电口 (目前为普通YP2 两引脚充电口)
升级接口(目前为USB串行升级接口)
评论
TA的案例
有3个案例


最近访客







